Robotics
The Robotics Central Scientific Facility supports the institute's research objectives via the design, rapid prototyping, and validation of novel robotic and mechatronic systems.
We recommend that you contact us early on in the development of new projects, when we can discuss how the ZWE could be most useful and formulate a collaborative plan.
Facilities
The Robotics ZWE offices and labs are located in the 3N corridor of the MPI-IS Stuttgart campus, including:
- ADDITIVE MANUFACTURING - The field of additive manufacturing (“3D Printing”) continues to evolve and grow at an astonishing rate. The fundamental principle is the layered deposition of material to fabricate given three-dimensional geometry. In an effort to support the diverse prototyping needs of the institute, the Robotics ZWE offers full-service 3D printing using a wide variety of techniques and processes, including fused-deposition modeling (FDM), stereolithography (SLA), multi-jet modeling (MJM), multi-material printing, and more.
- CIRCUIT FABRICATION - Recognizing that the majority of embedded electronic systems require the integration of compact, surface-mounted components on either rigid or flexible substrates, we have assembled the equipment and expertise to rapidly design, fabricate, and test advanced circuitry.
Expertise & Capabilities
Mechatronics is the synergistic fusion of mechanical design, electrical engineering, embedded programming, and systems integration. The melding together of these complementary disciplines has made possible the vast majority of the technology that pervades our lives, from modern automobiles to smartphones and surgical robots. Such systems are, by their very nature, rather complex. With over 20 years combined experience in mechatronic design and prototyping, the engineers of the Robotics ZWE are well equipped to assist with the design and realization of a wide range of mechatronic systems
- MECHANICAL COMPONENT DESIGN & PROTOTYPING
- SolidWorks 3D CAD
- FEA simulation
- additive manufacturing
- subtractive prototyping
- composite-part design and fabrication
- custom polymer casting fabrication
- ELECTRICAL CIRCUIT LAYOUT & PROTOTYPING
- high-density surface mount design
- rigid and flexible printed circuit prototyping and fabrication
- multi-layer circuits
- EMBEDDED SOFTWARE DEVELOPMENT
- familiarity with all major microcontroller architectures (AVR, ARM, TI, Freescale, Microchip, etc.)
- proficient in a variety of programming languages (C/C++, Java, Python, Matlab, etc.)
- extensive experience with various communication protocols (I2C, SPI, USB, CAN, etc.)
Members:


| Stuttgart |

| Stuttgart |

| Stuttgart | |
| 0711 - 689 3324 // 07071 - 601 1859 | |

| Stuttgart |
| +49 711 689-3581 | |

| Stuttgart |
Alumni:


2024

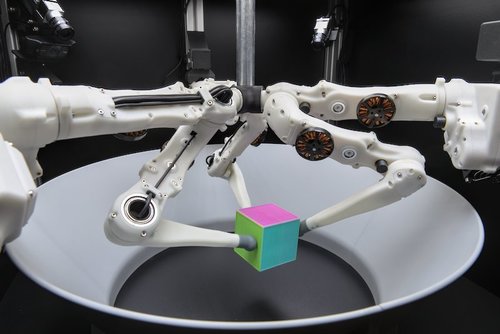
Safe & Accurate at Speed with Tendons: A Robot Arm for Exploring Dynamic Motion
Guist, S., Schneider, J., Ma, H., Chen, L., Berenz, V., Martus, J., Ott, H., Grüninger, F., Muehlebach, M., Fiene, J., Schölkopf, B., Büchler, D.
Proceedings of Robotics: Science and Systems, July 2024 (conference)
GaitGuide: A Wearable Device for Vibrotactile Motion Guidance
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
Workshop paper (3 pages) presented at the ICRA Workshop on Advancing Wearable Devices and Applications Through Novel Design, Sensing, Actuation, and AI, Yokohama, Japan, May 2024 (misc)
2023
A Robust Open-source Tendon-driven Robot Arm for Learning Control of Dynamic Motions
Guist, S., Schneider, J., Ma, H., Berenz, V., Martus, J., Grüninger, F., Muehlebach, M., Fiene, J., Schölkopf, B., Büchler, B.
RoboLetics: Workshop on Robot Learning in Athletics @CoRL 2023, November 2023 (conference)
2022

The Wheelbot: A Jumping Reaction Wheel Unicycle
Geist, A. R., Fiene, J., Tashiro, N., Jia, Z., Trimpe, S.
IEEE Robotics and Automation Letters, 7(4):9683-9690, IEEE, 2022 (article)

Endowing a NAO Robot with Practical Social-Touch Perception
Burns, R. B., Lee, H., Seifi, H., Faulkner, R., Kuchenbecker, K. J.
Frontiers in Robotics and AI, 9, pages: 840335, April 2022 (article)
2021
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Wüthrich*, M., Widmaier*, F., Bauer*, S., Funk, N., Urain, J., Peters, J., Watson, J., Chen, C., Srinivasan, K., Zhang, J., Zhang, J., Walter, M. R., Madan, R., Schaff, C., Maeda, T., Yoneda, T., Yarats, D., Allshire, A., Gordon, E. K., Bhattacharjee, T., Srinivasa, S. S., Garg, A., Buchholz, A., Stark, S., Steinbrenner, T., Akpo, J., Joshi, S., Agrawal, V., Schölkopf, B.
2021, *equal contribution (misc)
2020
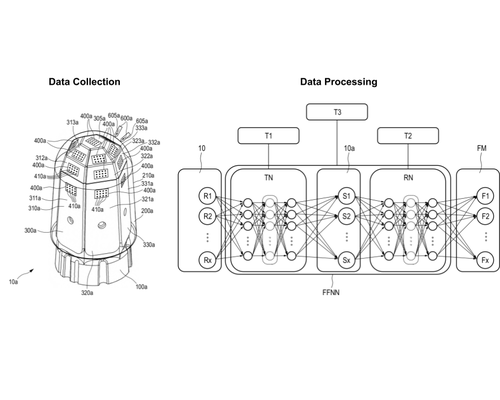
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
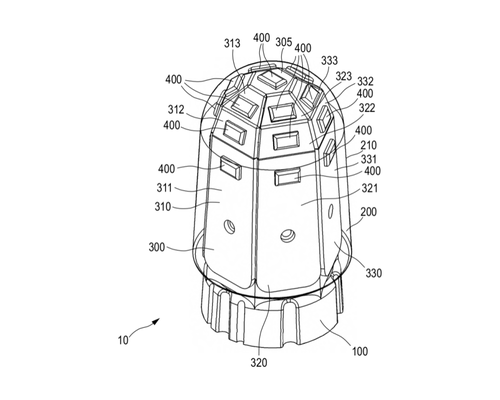
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
(PCT/EP2020/083260), November 2020 (patent)
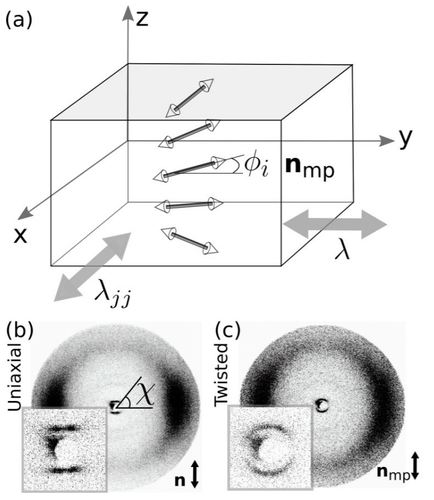
Twisting and untwisting of twisted nematic elastomers
Davidson, Z. S., Kapernaum, N., Fiene, J., Giesselmann, F., Sitti, M.
Physical Review Materials, 4(10):105601, 2020 (article)
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., Berenz, V., Heim, S., Widmaier, F., Flayols, T., Fiene, J., Badri-Spröwitz, A., Righetti, L.
IEEE Robotics and Automation Letters, 5(2):3650-3657, IEEE, April 2020 (article)