Videos
27 April 2024
03:34 Minutes
Stagewise Implementations of Sequential Quadratic Programming for Model-Predictive Control
2 October 2023
01:01 Minutes
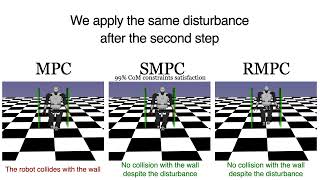
Stochastic and Robust MPC for Bipedal Locomotion: A Comparative Study on Robustness and Performance

2 October 2023
00:48 Minutes
Multi-Contact Stochastic Predictive Control for Legged Robots withContact Locations Uncertainty
7 April 2023
03:01 Minutes
Efficient Object Manipulation Planning with Monte Carlo Tree Search
7 April 2023
00:50 Minutes
Learning to Explore in Motion and Interaction Tasks

7 April 2023
02:58 Minutes
MPC with Sensor-Based Online Cost Adaptation

7 April 2023
01:40 Minutes
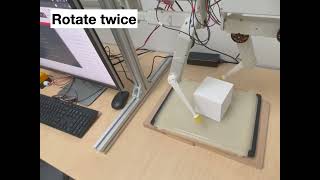
On the Derivation of the Contact Dynamics in Arbitrary Frames: Application to Polishing with Talos
7 April 2023
01:00 Minutes
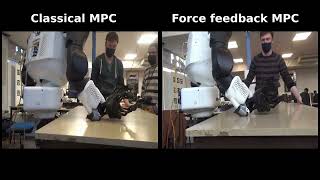
Introducing Force Feedback in Model Predictive Control
7 April 2023
02:43 Minutes
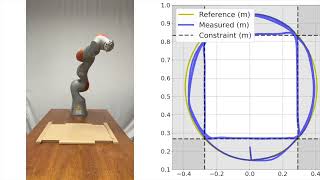
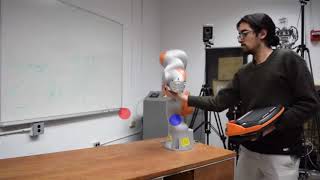
High-Frequency Nonlinear Model Predictive Control of a Manipulator
19 September 2022
02:03 Minutes
Nonlinear Stochastic Trajectory Optimization for Motion Generation of Legged Robots.

19 January 2022
04:28 Minutes
BiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
19 October 2021
01:00 Minutes
A unified framework for walking and running of bipedal robots
15 July 2021
04:54 Minutes
Model-free RL for Robust Locomotion Using Trajectory Optimization for Exploration

16 March 2021
01:49 Minutes
Solo12 Reactive Stepping in New York / NYU

16 November 2020
02:59 Minutes
Bipedal Walking Control using Variable Horizon MPC

10 November 2020
02:18 Minutes
Learning a Centroidal Motion Planner for Legged Locomotion

28 October 2020
02:33 Minutes
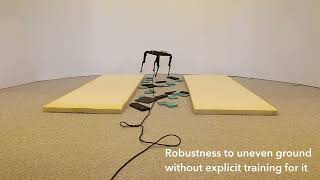
DeepQ Stepper: A framework for reactive dynamic walking on uneven terrain
14 July 2020
01:36 Minutes
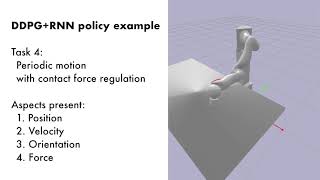
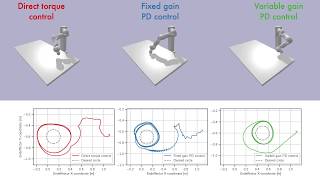
Learning Variable Impedance Control for Contact Sensitive Tasks
24 January 2019
01:46 Minutes
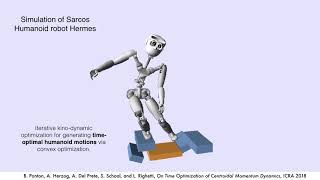
Multi-contact trajectory optimization
24 January 2019
03:20 Minutes
step timing adjustments
24 January 2019
00:58 Minutes
learning a structured neural network policy for a hopping task

24 January 2019
01:40 Minutes