
2023
Khorshidi, S., Gazar, A., Rotella, N., Naveau, M., Righetti, L., Bennewitz, M., Khadiv, M.
On the Use of Torque Measurement in Centroidal State Estimation
IEEE International Conference on Robotics and Automation (ICRA), pages: 9931-9937, May 2023 (conference)

Dhédin, V., Li, H., Khorshidi, S., Mack, L., Ravi, A. K. C., Meduri, A., Shah, P., Grimminger, F., Righetti, L., Khadiv, M., Stueckler, J.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2023 (inproceedings)
Meduri, A., Shah, P., Viereck, J., Khadiv, M., Havoutis, I., Righetti, L.
BiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
IEEE Transactions on Robotics, 39(2):905-922, IEEE, 2023 (article)
2022
Kleff, E. D. E. S. G. M. N. R. L.
Introducing Force Feedback in Model Predictive Control
Proceedings of the 2022 International Conference on Intelligent Robots and Systems (IROS), pages: 13379-13385, IEEE, International Conference on Intelligent Robots and Systems (IROS), October 2022 (conference)
Gazar, A., Khadiv, M., Kleff, S., DelPrete, A., Righetti, L.
Nonlinear Stochastic Trajectory Optimization for Centroidal Momentum Motion Generation of Legged Robots
In Robotics Research, pages: 420-435, Springer Proceedings in Advanced Robotics, 27, (Editors: Billard, Aude and Asfour, Tamim and Khatib, Oussama), Springer, Cham, 20th International Symposium on Robotics Research (ISRR 2022), September 2022 (inproceedings)
Bogdanovic, M., Khadiv, M., Righetti, L.
Model-free reinforcement learning for robust locomotion using demonstrations from trajectory optimization
Frontiers in Robotics and AI, 9, August 2022 (article)
Hammoud, B., Jordana, A., Righetti, L.
iRiSC: Iterative Risk Sensitive Control for Nonlinear Systems with Imperfect Observations
In 2022 American Control Conference (ACC 2022), pages: 3550-3557, IEEE, Piscataway, NJ, American Control Conference (ACC 2022), June 2022 (inproceedings)
Jordana, A., Hammoud, B., Carpentier, J., Righetti, L.
Stagewise Newton Method for Dynamic Game Control With Imperfect State Observation
IEEE Control Systems Letters, 6, pages: 3241-3246, IEEE, Piscataway, NJ, USA, 2022 (article)
2021
Boroujeni, M. G., Daneshmand, E., Righetti, L., Khadiv, M.
A unified framework for walking and running of bipedal robots
20th International Conference on Advanced Robotics (ICAR), December 2021 (conference) Accepted
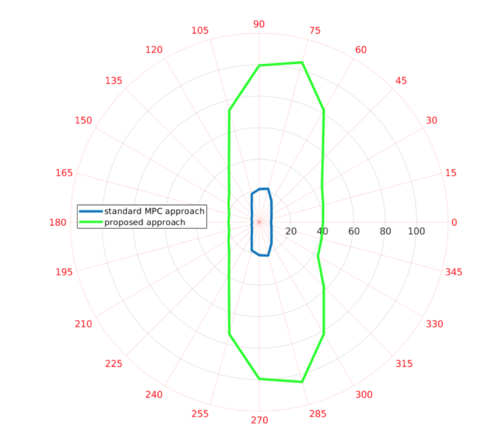
Yeganegi, M. H., Khadiv, M., Prete, A. D., Moosavian, S. A. A., Righetti, L.
Robust walking based on MPC with viability guarantees
IEEE Transactions on Robotics, October 2021 (article) Accepted
Berenz, V., Naveau, M., Widmaier, F., Wüthrich, M., Passy, J., Guist, S., Büchler, D.
The o80 C++ templated toolbox: Designing customized Python APIs for synchronizing realtime processes
Journal of Open Source Software, 6(66), October 2021 (article)
Shah, P., Meduri, A., Merkt, W., Khadiv, M., Havoutis, I., Righetti, L.
Rapid Convex Optimization of Centroidal Dynamics using Block Coordinate Descent
In Proceedings of the International Conference on Intelligent Robots and Systems (IROS 2021) , IEEE, 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) in Prague, Czech Republic., September 2021 (inproceedings) Accepted
Gazar, A., Khadiv, M., DelPrete, A., Righetti, L.
Stochastic and robust mpc for bipedal locomotion: A comparative study on robustness and performance
pages: 1-8, IEEE, IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), July 2021 (conference)
Hammoud, B., Khadiv, M., Righetti, L.
Impedance Optimization for Uncertain Contact Interactions Through Risk Sensitive Optimal Control
IEEE Robotics and Automation Letters, Robotics and Automation Letters, 6(3):4766-4773, IEEE, July 2021 (article)
Kleff, S., Meduri, A., Budhiraja, R., Mansard, N., Righetti, L.
High-frequency nonlinear model predictive control of a manipulator
In 2021 IEEE International Conference on Robotics and Automation (ICRA), pages: 7330-7336 , The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (inproceedings)
Bechtle, S., Hammoud, B., Rai, A., Meier, F., Righetti, L.
Leveraging Forward Model Prediction Error for Learning Control
2021 IEEE International Conference on Robotics and Automation (ICRA) , pages: 4445-4451 , IEEE International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Viereck, J., Righetti, L.
Learning a Centroidal Motion Planner for Legged Locomotion
2021 IEEE International Conference on Robotics and Automation (ICRA), pages: 4905-4911 , IEEE, The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Meduri, A., Khadiv, M., Righetti, L.
DeepQ Stepper: A framework for reactive dynamic walking on uneven terrain
The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Daneshmand, E., Khadiv, M., Grimminger, F., Righetti, L.
Variable Horizon MPC with Swing Foot Dynamics for Bipedal Walking Control
IEEE Robotics and Automation Letters, 6(2):2349-2356, April 2021 (article)
Ponton, B., Khadiv, M., Meduri, A., Righetti, L.
Efficient Multi-Contact Pattern Generation with Sequential Convex Approximations of the Centroidal Dynamics
IEEE Transactions on Robotics, 37(5):1661-1679, IEEE, February 2021 (article)
Marco, A., Baumann, D., Khadiv, M., Hennig, P., Righetti, L., Trimpe, S.
Robot Learning with Crash Constraints
IEEE Robotics and Automation Letters, 6(2):1439-1446, IEEE, February 2021 (article)
Flayols, T., Prete, A. D., Khadiv, M., Mansard, N., Righetti, L.
Reactive Balance Control for Legged Robots under Visco-Elastic Contacts
Applied Sciences, 11(1), MDPI, 2021 (article)
Bechtle, S., Molchanov, A., Chebotar, Y., Grefenstette, E., Righetti, L., Sukhatme, G., Meier, F.
Meta-Learning via Learned Loss
In 2020 25th International Conference on Pattern Recognition (ICPR), IEEE, January 2021 (inproceedings)
Gazar, A., Nava, G., Chavez, F. J. A., Pucci, D.
Jerk Control of Floating Base Systems With Contact-Stable Parameterized Force Feedback
IEEE Transactions on Robotics, 37(1):1-15, IEEE, 2021 (article)
2020
Choi, H., Crump, C., Duriez, C., Elmquist, A., Hager, G., Han, D., Hearl, F., Hodgins, J., Jain, A., Leve, F., Li, C., Meier, F., Negrut, D., Righetti, L., Rodriguez, A., Tan, J., Trinkle, J.
On the use of simulation in robotics: Opportunities challenges, and suggestions for moving forward
PNAS, 118(1), December 2020 (article)
Wüthrich, M., Widmaier, F., Grimminger, F., Akpo, J., Joshi, S., Agrawal, V., Hammoud, B., Khadiv, M., Bogdanovic, M., Berenz, V., Viereck, J., Naveau, M., Righetti, L., Schölkopf, B., Bauer, S.
TriFinger: An Open-Source Robot for Learning Dexterity
Proceedings of the 4th Conference on Robot Learning (CoRL), 155, pages: 1871-1882, Proceedings of Machine Learning Research, (Editors: Jens Kober and Fabio Ramos and Claire J. Tomlin), PMLR, November 2020 (conference)
Zhu, H., Sharma, M., Pfeiffer, K., Mezzavilla, M., Shen, J., Rangan, S., Righetti, L.
Enabling Remote Whole-Body Control with 5G Edge Computing
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 3553-3560, IEEE, Piscataway, NJ, USA, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2020 (conference) Accepted
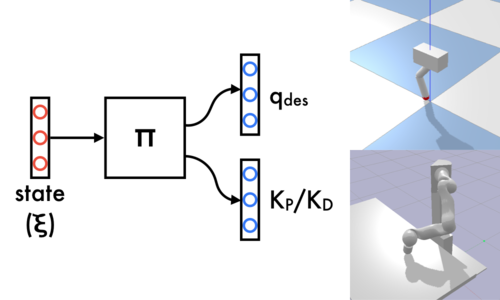
Bogdanovic, M., Khadiv, M., Righetti, L.
Learning Variable Impedance Control for Contact Sensitive Tasks
IEEE Robotics and Automation Letters, 5(4), IEEE, October 2020 (article)
Khadiv, M., Herzog, A., Moosavian, S. A. A., Righetti, L.
Walking Control Based on Step Timing Adaptation
IEEE Transactions on Robotics, 36(3):629-643, IEEE, June 2020 (article)
Mastalli, C., Budhiraja, R., Merkt, W., Saurel, G., Hammoud, B., Naveau, M., Carpentier, J., Righetti, L., Vijayakumar, S., Mansard, N.
Crocoddyl: An efficient and versatile framework for multi-contact optimal control
In Proceedings of the IEEE International Conference on Robotics and Automation, IEEE, International Conference on Robotics and Automation, May 2020 (inproceedings)
Bechtle, S., Lin, Y., Rai, A., Righetti, L., Meier, F.
Curious ilqr: Resolving uncertainty in model-based rl
Conference on Robot Learning, May 2020 (conference)
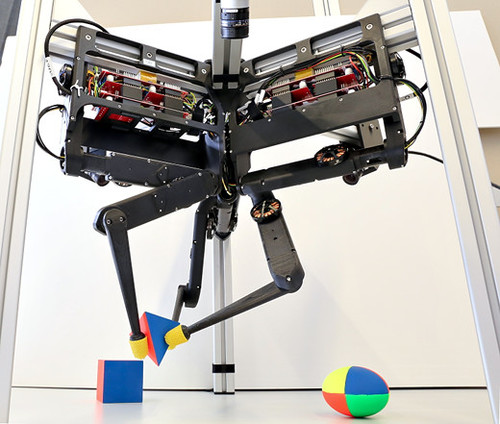
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., Berenz, V., Heim, S., Widmaier, F., Flayols, T., Fiene, J., Badri-Spröwitz, A., Righetti, L.
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
IEEE Robotics and Automation Letters, 5(2):3650-3657, IEEE, April 2020 (article)
Lin, Y., Righetti, L., Berenson, D.
Robust Humanoid Contact Planning with Learned Zero-and One-Step Capturability Prediction
IEEE Robotics and Automation Letters, Robotics and Automation Letters, 5, pages: 2451-2458, IEEE, February 2020 (article)
Agudelo-España, D., Zadaianchuk, A., Wenk, P., Garg, A., Akpo, J., Grimminger, F., Viereck, J., Naveau, M., Righetti, L., Martius, G., Krause, A., Schölkopf, B., Bauer, S., Wüthrich, M.
A Real-Robot Dataset for Assessing Transferability of Learned Dynamics Models
IEEE International Conference on Robotics and Automation (ICRA), pages: 8151-8157, IEEE, 2020 (conference)
Lin, Y., Bechtle, S., Righetti, L., Rai, A., Meier, F.
EXPLORING BY EXPLOITING BAD MODELS IN MODEL-BASED REINFORCEMENT LEARNING
International Conference on Learning Representations, 2020 (conference)
2019
Bretl, T., Righetti, L., Madhavan, R.
Epstein, Project Maven, and Some Reasons to Think About Where We Get Our Funding [Ethical, Legal, and Societal Issues]
IEEE Robotics & Automation Magazine, 26, December 2019 (article)
Bogdanovic, M., Righetti, L.
Learning to Explore in Motion and Interaction Tasks
Proceedings 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 2686-2692, IEEE, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 2019, ISSN: 2153-0866 (conference)
Yeganegi, M. H., Khadiv, M., Moosavian, S. A. A., Zhu, J., Prete, A. D., Righetti, L.
Robust Humanoid Locomotion Using Trajectory Optimization and Sample-Efficient Learning
Proceedings International Conference on Humanoid Robots, IEEE, 2019 IEEE-RAS International Conference on Humanoid Robots, October 2019 (conference)
Righetti, L., Madhavan, R., Chatila, R.
Unintended Consequences of Biased Robotic and Artificial Intelligence Systems [Ethical, Legal, and Societal Issues]
IEEE Robotics & Automation Magazine, 26, September 2019 (article)
Lin, Y., Ponton, B., Righetti, L., Berenson, D.
Efficient Humanoid Contact Planning using Learned Centroidal Dynamics Prediction
International Conference on Robotics and Automation (ICRA), pages: 5280-5286, IEEE, May 2019 (conference)
Merzic, H., Bogdanovic, M., Kappler, D., Righetti, L., Bohg, J.
Leveraging Contact Forces for Learning to Grasp
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, IEEE, International Conference on Robotics and Automation, May 2019 (inproceedings)
Shahrokhshahi, A., Yousefi-Koma, A., Khadiv, M., Mansouri, S., Mohtasebi, S. S.
Optimal Stair Climbing Pattern Generation for Humanoids Using Virtual Slope and Distributed Mass Model
Journal of Intelligent and Robotics Systems, 94:1, pages: 43-59, April 2019 (article)
Rebula, J. R., Schaal, S., Finley, J., Righetti, L.
A Robustness Analysis of Inverse Optimal Control of Bipedal Walking
IEEE Robotics and Automation Letters, 4(4):4531-4538, 2019 (article)
Khadiv, M., Moosavian, S. A. A., Yousefi-Koma, A., Sadedel, M., Ehsani-Seresht, A., Mansouri, S.
Rigid vs compliant contact: an experimental study on biped walking
Multibody System Dynamics, 45(4):379-401, 2019 (article)
Schmidt, P., Blessing, M., Rageot, M., Iovita, R., Pfleging, J., Nickel, K. G., Righetti, L., Tennie, C.
Birch tar production does not prove Neanderthal behavioral complexity
Proceedings of the National Academy of Sciences (PNAS), 116(36):17707-17711, 2019 (article)
2018
Mirjalili, R., Yousefi-koma, A., Shirazi, F. A., Nikkhah, A., Nazemi, F., Khadiv, M.
A Whole-Body Model Predictive Control Scheme Including External Contact Forces and CoM Height Variations
Proceedings International Conference on Humanoid Robots, IEEE, Beijing, China, 2018 IEEE-RAS International Conference on Humanoid Robots, November 2018 (conference)
Borno, M. A., Righetti, L., Black, M. J., Delp, S. L., Fiume, E., Romero, J.
Robust Physics-based Motion Retargeting with Realistic Body Shapes
Computer Graphics Forum, 37, pages: 6:1-12, July 2018 (article)
Ponton, B., Herzog, A., Del Prete, A., Schaal, S., Righetti, L.
On Time Optimization of Centroidal Momentum Dynamics
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 5776-5782, IEEE, Brisbane, Australia, 2018 (inproceedings)
Viereck, J., Kozolinsky, J., Herzog, A., Righetti, L.
Learning a Structured Neural Network Policy for a Hopping Task.
IEEE Robotics and Automation Letters, 3(4):4092-4099, October 2018 (article)
Pham, Q., Madhavan, R., Righetti, L., Smart, W., Chatila, R.
The Impact of Robotics and Automation on Working Conditions and Employment [Ethical, Legal, and Societal Issues]
IEEE Robotics and Automation Magazine, 25(2):126-128, June 2018 (article)