
2023
Khorshidi, S., Gazar, A., Rotella, N., Naveau, M., Righetti, L., Bennewitz, M., Khadiv, M.
On the Use of Torque Measurement in Centroidal State Estimation
IEEE International Conference on Robotics and Automation (ICRA), pages: 9931-9937, May 2023 (conference)

Dhédin, V., Li, H., Khorshidi, S., Mack, L., Ravi, A. K. C., Meduri, A., Shah, P., Grimminger, F., Righetti, L., Khadiv, M., Stueckler, J.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2023 (inproceedings)
2022
Kleff, E. D. E. S. G. M. N. R. L.
Introducing Force Feedback in Model Predictive Control
Proceedings of the 2022 International Conference on Intelligent Robots and Systems (IROS), pages: 13379-13385, IEEE, International Conference on Intelligent Robots and Systems (IROS), October 2022 (conference)
Gazar, A., Khadiv, M., Kleff, S., DelPrete, A., Righetti, L.
Nonlinear Stochastic Trajectory Optimization for Centroidal Momentum Motion Generation of Legged Robots
In Robotics Research, pages: 420-435, Springer Proceedings in Advanced Robotics, 27, (Editors: Billard, Aude and Asfour, Tamim and Khatib, Oussama), Springer, Cham, 20th International Symposium on Robotics Research (ISRR 2022), September 2022 (inproceedings)
Hammoud, B., Jordana, A., Righetti, L.
iRiSC: Iterative Risk Sensitive Control for Nonlinear Systems with Imperfect Observations
In 2022 American Control Conference (ACC 2022), pages: 3550-3557, IEEE, Piscataway, NJ, American Control Conference (ACC 2022), June 2022 (inproceedings)
2021
Boroujeni, M. G., Daneshmand, E., Righetti, L., Khadiv, M.
A unified framework for walking and running of bipedal robots
20th International Conference on Advanced Robotics (ICAR), December 2021 (conference) Accepted
Shah, P., Meduri, A., Merkt, W., Khadiv, M., Havoutis, I., Righetti, L.
Rapid Convex Optimization of Centroidal Dynamics using Block Coordinate Descent
In Proceedings of the International Conference on Intelligent Robots and Systems (IROS 2021) , IEEE, 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) in Prague, Czech Republic., September 2021 (inproceedings) Accepted
Gazar, A., Khadiv, M., DelPrete, A., Righetti, L.
Stochastic and robust mpc for bipedal locomotion: A comparative study on robustness and performance
pages: 1-8, IEEE, IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), July 2021 (conference)
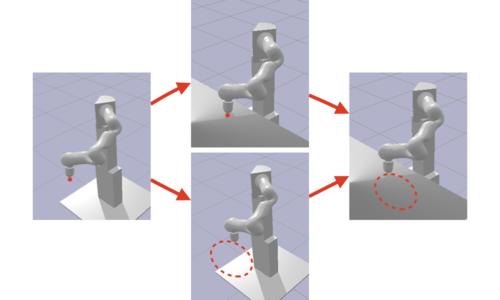
Kleff, S., Meduri, A., Budhiraja, R., Mansard, N., Righetti, L.
High-frequency nonlinear model predictive control of a manipulator
In 2021 IEEE International Conference on Robotics and Automation (ICRA), pages: 7330-7336 , The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (inproceedings)
Bechtle, S., Hammoud, B., Rai, A., Meier, F., Righetti, L.
Leveraging Forward Model Prediction Error for Learning Control
2021 IEEE International Conference on Robotics and Automation (ICRA) , pages: 4445-4451 , IEEE International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Viereck, J., Righetti, L.
Learning a Centroidal Motion Planner for Legged Locomotion
2021 IEEE International Conference on Robotics and Automation (ICRA), pages: 4905-4911 , IEEE, The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Meduri, A., Khadiv, M., Righetti, L.
DeepQ Stepper: A framework for reactive dynamic walking on uneven terrain
The 2021 International Conference on Robotics and Automation (ICRA 2021), June 2021 (conference)
Bechtle, S., Molchanov, A., Chebotar, Y., Grefenstette, E., Righetti, L., Sukhatme, G., Meier, F.
Meta-Learning via Learned Loss
In 2020 25th International Conference on Pattern Recognition (ICPR), IEEE, January 2021 (inproceedings)
2020
Wüthrich, M., Widmaier, F., Grimminger, F., Akpo, J., Joshi, S., Agrawal, V., Hammoud, B., Khadiv, M., Bogdanovic, M., Berenz, V., Viereck, J., Naveau, M., Righetti, L., Schölkopf, B., Bauer, S.
TriFinger: An Open-Source Robot for Learning Dexterity
Proceedings of the 4th Conference on Robot Learning (CoRL), 155, pages: 1871-1882, Proceedings of Machine Learning Research, (Editors: Jens Kober and Fabio Ramos and Claire J. Tomlin), PMLR, November 2020 (conference)
Zhu, H., Sharma, M., Pfeiffer, K., Mezzavilla, M., Shen, J., Rangan, S., Righetti, L.
Enabling Remote Whole-Body Control with 5G Edge Computing
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 3553-3560, IEEE, Piscataway, NJ, USA, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2020 (conference) Accepted
Mastalli, C., Budhiraja, R., Merkt, W., Saurel, G., Hammoud, B., Naveau, M., Carpentier, J., Righetti, L., Vijayakumar, S., Mansard, N.
Crocoddyl: An efficient and versatile framework for multi-contact optimal control
In Proceedings of the IEEE International Conference on Robotics and Automation, IEEE, International Conference on Robotics and Automation, May 2020 (inproceedings)
Bechtle, S., Lin, Y., Rai, A., Righetti, L., Meier, F.
Curious ilqr: Resolving uncertainty in model-based rl
Conference on Robot Learning, May 2020 (conference)
Agudelo-España, D., Zadaianchuk, A., Wenk, P., Garg, A., Akpo, J., Grimminger, F., Viereck, J., Naveau, M., Righetti, L., Martius, G., Krause, A., Schölkopf, B., Bauer, S., Wüthrich, M.
A Real-Robot Dataset for Assessing Transferability of Learned Dynamics Models
IEEE International Conference on Robotics and Automation (ICRA), pages: 8151-8157, IEEE, 2020 (conference)
Lin, Y., Bechtle, S., Righetti, L., Rai, A., Meier, F.
EXPLORING BY EXPLOITING BAD MODELS IN MODEL-BASED REINFORCEMENT LEARNING
International Conference on Learning Representations, 2020 (conference)
2019
Bogdanovic, M., Righetti, L.
Learning to Explore in Motion and Interaction Tasks
Proceedings 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 2686-2692, IEEE, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 2019, ISSN: 2153-0866 (conference)
Yeganegi, M. H., Khadiv, M., Moosavian, S. A. A., Zhu, J., Prete, A. D., Righetti, L.
Robust Humanoid Locomotion Using Trajectory Optimization and Sample-Efficient Learning
Proceedings International Conference on Humanoid Robots, IEEE, 2019 IEEE-RAS International Conference on Humanoid Robots, October 2019 (conference)
Lin, Y., Ponton, B., Righetti, L., Berenson, D.
Efficient Humanoid Contact Planning using Learned Centroidal Dynamics Prediction
International Conference on Robotics and Automation (ICRA), pages: 5280-5286, IEEE, May 2019 (conference)
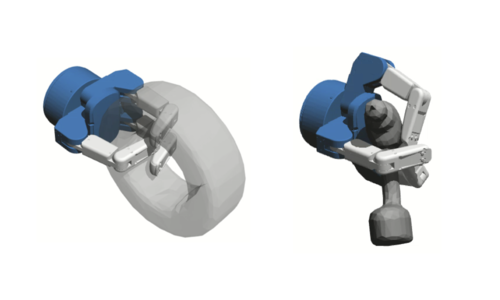
Merzic, H., Bogdanovic, M., Kappler, D., Righetti, L., Bohg, J.
Leveraging Contact Forces for Learning to Grasp
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, IEEE, International Conference on Robotics and Automation, May 2019 (inproceedings)
2018
Mirjalili, R., Yousefi-koma, A., Shirazi, F. A., Nikkhah, A., Nazemi, F., Khadiv, M.
A Whole-Body Model Predictive Control Scheme Including External Contact Forces and CoM Height Variations
Proceedings International Conference on Humanoid Robots, IEEE, Beijing, China, 2018 IEEE-RAS International Conference on Humanoid Robots, November 2018 (conference)
Ponton, B., Herzog, A., Del Prete, A., Schaal, S., Righetti, L.
On Time Optimization of Centroidal Momentum Dynamics
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 5776-5782, IEEE, Brisbane, Australia, 2018 (inproceedings)
Rotella, N., Schaal, S., Righetti, L.
Unsupervised Contact Learning for Humanoid Estimation and Control
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 411-417, IEEE, Brisbane, Australia, 2018 (inproceedings)
Gams, A., Mason, S., Ude, A., Schaal, S., Righetti, L.
Learning Task-Specific Dynamics to Improve Whole-Body Control
In Hua, IEEE, Beijing, China, November 2018 (inproceedings)
Mason, S., Rotella, N., Schaal, S., Righetti, L.
An MPC Walking Framework With External Contact Forces
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 1785-1790, IEEE, Brisbane, Australia, May 2018 (inproceedings)
2017
Khadiv, M., Moosavian, S. A. A., Herzog, A., Righetti, L.
Pattern Generation for Walking on Slippery Terrains
In 2017 5th International Conference on Robotics and Mechatronics (ICROM), Iran, August 2017 (inproceedings)
2016
Ponton, B., Schaal, S., Righetti, L.
On the Effects of Measurement Uncertainty in Optimal Control of Contact Interactions
In The 12th International Workshop on the Algorithmic Foundations of Robotics WAFR, Berkeley, USA, 2016 (inproceedings)
Ponton, B., Herzog, A., Schaal, S., Righetti, L.
A Convex Model of Momentum Dynamics for Multi-Contact Motion Generation
In 2016 IEEE-RAS 16th International Conference on Humanoid Robots Humanoids, pages: 842-849, IEEE, Cancun, Mexico, 2016 (inproceedings)
Rotella, N., Mason, S., Schaal, S., Righetti, L.
Inertial Sensor-Based Humanoid Joint State Estimation
In 2016 IEEE International Conference on Robotics and Automation (ICRA), pages: 1825-1831, IEEE, Stockholm, Sweden, 2016 (inproceedings)
Khadiv, M., Kleff, S., Herzog, A., Moosavian, S. A. A., Schaal, S., Righetti, L.
Stepping Stabilization Using a Combination of DCM Tracking and Step Adjustment
In 2016 4th International Conference on Robotics and Mechatronics (ICROM), pages: 130-135, IEEE, Teheran, Iran, 2016 (inproceedings)
Herzog, A., Schaal, S., Righetti, L.
Structured contact force optimization for kino-dynamic motion generation
In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 2703-2710, IEEE, Daejeon, South Korea, 2016 (inproceedings)
Mason, S., Rotella, N., Schaal, S., Righetti, L.
Balancing and Walking Using Full Dynamics LQR Control With Contact Constraints
In 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pages: 63-68, IEEE, Cancun, Mexico, 2016 (inproceedings)
Khadiv, M., Herzog, A., Moosavian, S. A. A., Righetti, L.
Step Timing Adjustement: a Step toward Generating Robust Gaits
In 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pages: 35-42, IEEE, Cancun, Mexico, 2016 (inproceedings)
2015
Herzog, A., Rotella, N., Schaal, S., Righetti, L.
Trajectory generation for multi-contact momentum control
In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), pages: 874-880, IEEE, Seoul, South Korea, 2015 (inproceedings)
Rotella, N., Herzog, A., Schaal, S., Righetti, L.
Humanoid Momentum Estimation Using Sensed Contact Wrenches
In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), pages: 556-563, IEEE, Seoul, South Korea, 2015 (inproceedings)
2014
Toussaint, M., Ratliff, N., Bohg, J., Righetti, L., Englert, P., Schaal, S.
Dual Execution of Optimized Contact Interaction Trajectories
In 2014 IEEE/RSJ Conference on Intelligent Robots and Systems, pages: 47-54, IEEE, Chicago, USA, 2014 (inproceedings)
Herzog, A., Righetti, L., Grimminger, F., Pastor, P., Schaal, S.
Balancing experiments on a torque-controlled humanoid with hierarchical inverse dynamics
In 2014 IEEE/RSJ Conference on Intelligent Robots and Systems, pages: 981-988, IEEE, Chicago, USA, 2014 (inproceedings)
Mason, S., Righetti, L., Schaal, S.
Full Dynamics LQR Control of a Humanoid Robot: An Experimental Study on Balancing and Squatting
In 2014 IEEE-RAS International Conference on Humanoid Robots, pages: 374-379, IEEE, Madrid, Spain, 2014 (inproceedings)
Rotella, N., Bloesch, M., Righetti, L., Schaal, S.
State Estimation for a Humanoid Robot
In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages: 952-958, IEEE, Chicago, USA, 2014 (inproceedings)
2013
Hutter, M., Bloesch, M., Buchli, J., Semini, C., Bazeille, S., Righetti, L., Bohg, J.
AGILITY – Dynamic Full Body Locomotion and Manipulation with Autonomous Legged Robots
In 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pages: 1-4, IEEE, Linköping, Sweden, 2013 (inproceedings)
Kalakrishnan, M., Pastor, P., Righetti, L., Schaal, S.
Learning Objective Functions for Manipulation
In 2013 IEEE International Conference on Robotics and Automation, IEEE, Karlsruhe, Germany, 2013 (inproceedings)
Pastor, P., Kalakrishnan, M., Binney, J., Kelly, J., Righetti, L., Sukhatme, G. S., Schaal, S.
Learning Task Error Models for Manipulation
In 2013 IEEE Conference on Robotics and Automation, IEEE, Karlsruhe, Germany, 2013 (inproceedings)
2012
Ernesti, J., Righetti, L., Do, M., Asfour, T., Schaal, S.
Encoding of Periodic and their Transient Motions by a Single Dynamic Movement Primitive
In 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pages: 57-64, IEEE, Osaka, Japan, November 2012 (inproceedings)
Kalakrishnan, M., Righetti, L., Pastor, P., Schaal, S.
Learning Force Control Policies for Compliant Robotic Manipulation
In ICML’12 Proceedings of the 29th International Coference on International Conference on Machine Learning, pages: 49-50, Edinburgh, Scotland, 2012 (inproceedings)
Righetti, L., Schaal, S.
Quadratic programming for inverse dynamics with optimal distribution of contact forces
In 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pages: 538-543, IEEE, Osaka, Japan, November 2012 (inproceedings)
Pastor, P., Kalakrishnan, M., Righetti, L., Schaal, S.
Towards Associative Skill Memories
In 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pages: 309-315, IEEE, Osaka, Japan, November 2012 (inproceedings)
Herzog, A., Pastor, P., Kalakrishnan, M., Righetti, L., Asfour, T., Schaal, S.
Template-based learning of grasp selection
In 2012 IEEE International Conference on Robotics and Automation, pages: 2379-2384, IEEE, Saint Paul, USA, 2012 (inproceedings)